ADD: README
This commit is contained in:
parent
5a3ed507b2
commit
4ac8b72fb0
1 changed files with 23 additions and 3 deletions
26
README.md
26
README.md
|
|
@ -1,7 +1,7 @@
|
|||
# New Firmware! Now with actual current sensing!
|
||||
This firmware is much better than the old one. tested up to 40A / 60V, no dead board so far :)
|
||||
|
||||
## Hoverboard-Board-Hack
|
||||
## hoverboard-firmware-hack
|
||||
|
||||
This repo contains open source firmware for generic Hoverboard Mainboards.
|
||||
The firmware you can find here allows you to use your Hoverboard Hardware (like the Mainboard, Motors and Battery) for cool projects like driving armchairs, person-tracking transportation robots and every other application you can imagine that requires controlling the Motors.
|
||||
|
|
@ -9,7 +9,7 @@ The firmware you can find here allows you to use your Hoverboard Hardware (like
|
|||
---
|
||||
|
||||
#### Hardware
|
||||

|
||||
|
||||
|
||||
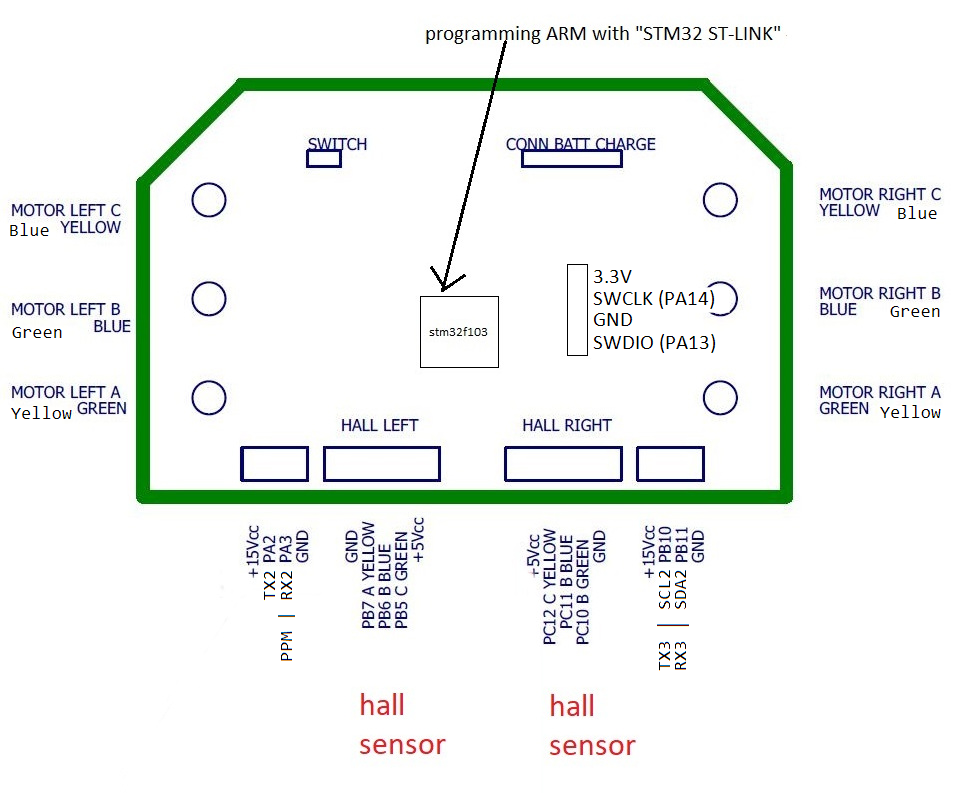
The original Hardware supports two 4-pin cables that originally were connected to the two sensor boards. They break out GND, 12/15V and USART2&3 of the Hoverboard mainboard.
|
||||
Both USART2 & 3 can be used for UART and I2C, PA2&3 can be used as 12bit ADCs.
|
||||
|
|
@ -21,10 +21,30 @@ To build the firmware, just type "make". Make sure you have specified your gcc-a
|
|||
|
||||
Make sure you hold the powerbutton or connect a jumper to the power button pins while flashing the firmware, as the STM might release the power latch and switches itself off during flashing.
|
||||
|
||||
To flash the STM32, use the ST-Flash utility (https://github.com/texane/stlink).
|
||||
|
||||
If you never flashed your mainboard before, the STM is probably locked. To unlock the flash, use the following OpenOCD command:
|
||||
|
||||
```
|
||||
openocd -f interface/stlink-v2.cfg -f target/stm32f1x.cfg -c init -c "stm32f1x unlock 0"
|
||||
```
|
||||
Then you can simply flash the firmware:
|
||||
```
|
||||
st-flash write build/hoverboard.bin 0x8000000
|
||||
```
|
||||
|
||||
---
|
||||
#### Troubleshooting
|
||||
First, check that power is connected and voltage is > 36V.
|
||||
If the board draws more than 100mA in idle, it's probably broken.
|
||||
|
||||
If the motors do something, but don't rotate smooth and quietly, try to use an alternative phase mapping. Usually, color-correct mapping (blue to blue, green to green, yellow to yellow) works fine. However, some hoverboards have a different layout then others, and this might be the reason your motor isn't spinning.
|
||||
|
||||
---
|
||||
|
||||
|
||||
#### Examples
|
||||
|
||||
Have a looh at the config.h in the Inc directory. That's where you configure to firmware to match your project.
|
||||
Have a look at the config.h in the Inc directory. That's where you configure to firmware to match your project.
|
||||
Currently supported: Wii Nunchuck, analog potentiometer and PPM signal from a RC remote.
|
||||
If you need additional features like a boost button, have a look at the while(1) loop in the main.c
|
||||
|
|
|
|||
Loading…
Reference in a new issue